Reactive Navigation in Non-Convex Environments
Closed-loop, vector field based planning offers an important alternative to traditional motion planning techniques (e.g., RRTs), due to their robustness when modeling errors and sensory noise become important. Traditionally, guaranteed convergence to a designated goal within the context of vector-field based planning had only been established for reactive planners possessing substantial prior knowledge about the environment. However, sensor-based reactive methods are needed to guarantee safe navigation in an unknown environment with unforeseen obstacles. Important recent advances in the theory of sensor-based navigation show how to successfully negotiate unknown obstacles in real time without losing global convergence guarantees, but are limited by the necessity of simple geometry (i.e., the obstacles need to be strongly convex).
This research demonstrates how partial knowledge may suffice to inform safe, convergent, reactive navigation in geometrically more interesting environments. Recent developments in semantic SLAM and object pose and triangular mesh extraction using convolutional neural net architectures now provide an avenue for incorporating partial prior knowledge within a deterministic framework well suited to vector field planning methods.
In our work, we assume a catalogue of known shapes that can be recognized and localized online by a limited range onboard sensor. We solve the navigation problem by interpolating a sequence of spaces between the physical and a topologically equivalent but geometrically simple model space, and we prove that the conjugate vector field defined by pulling back the reactive model space planner through this diffeomorphism induces a vector field on the robot’s physical configuration space that inherits the same formal guarantees of obstacle avoidance and convergence.
We also extend the construction to the case of a differential drive robot, by pulling back the extended field over planar rigid transformations through a suitable polar coordinate transformation of the tangent lift of our original planar diffeomorphism and demonstrate, once again, that the physical differential drive robot inherits the same obstacle avoidance and convergence properties as those guaranteed for the fully actuated robot. To better support online implementation of these constructions, we adopt modular methods for implicit descriptions of geometric shape.
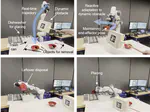
Moreover, by incorporating a human mesh estimation algorithm and extending our formal results to suitably non-adversarial moving targets, our system is capable of reacting and responding in real time to semantically labeled human motions and gestures (e.g., track a given target unless encountering a specific human gesture, as shown below). Targets are robustly followed up to speeds amenable to the perceptual pipeline’s tracking rate in several highly varied environments.
Using the feature of semantic inference provided by the semantic mapping pipeline, the user can also command the robot to target a semantic goal, instead of a merely geometric one. In the example below, we command the Minitaur robot to move to a geometrically predefined target, unless it sees and localizes a cart; in that case, it is tasked with approaching the cart, facing it with its camera, and using mobile manipulation primitives to jump and mount it. This is a first step toward integrating the reactive planning architecture developed in this work in a multi-layer architecture for accomplishing increasingly complicated mobile manipulation tasks with underactuated legged robots in environments that are semantically partially known and geometrically unknown.