Vasileios Vasilopoulos
Vasileios Vasilopoulos
About
Publications
Contact
Light
Dark
Automatic
1
HIO-SDF: Hierarchical Incremental Online Signed Distance Fields
A good representation of a large, complex mobile robot workspace must be space-efficient yet capable of encoding relevant geometric …
Vasileios Vasilopoulos
,
Suveer Garg
,
Jinwook Huh
,
Bhoram Lee
,
Volkan Isler
PDF
Code
arXiv
BibTeX
RAMP: Hierarchical Reactive Motion Planning for Manipulation Tasks Using Implicit Signed Distance Functions
We introduce Reactive Action and Motion Planner (RAMP), which combines the strengths of search-based and reactive approaches for motion …
Vasileios Vasilopoulos
,
Suveer Garg
,
Pedro Piacenza
,
Jinwook Huh
,
Volkan Isler
PDF
SR Tech Blog
Code
arXiv
BibTeX
A Hierarchical Deliberative-Reactive System Architecture for Task and Motion Planning in Partially Known Environments
We describe a task and motion planning architecture for highly dynamic systems that combines a domain-independent sampling-based …
Vasileios Vasilopoulos
,
Sebastian Castro
,
William Vega-Brown
,
Daniel E. Koditschek
,
Nicholas Roy
PDF
Video
Technical Report
BibTeX
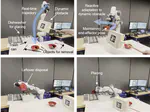
Reactive Informative Planning for Mobile Manipulation Tasks under Sensing and Environmental Uncertainty
In this paper we address mobile manipulation planning problems in the presence of sensing and environmental uncertainty. In particular, …
Mariliza Tzes
,
Vasileios Vasilopoulos
,
Yiannis Kantaros
,
George J. Pappas
PDF
BibTeX
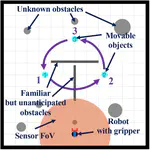
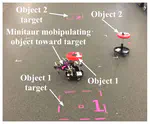
Reactive Planning for Mobile Manipulation Tasks in Unexplored Semantic Environments
Complex manipulation tasks, such as rearrangement planning of numerous objects, are combinatorially hard problems. Existing algorithms …
Vasileios Vasilopoulos
,
Yiannis Kantaros
,
George J. Pappas
,
Daniel E. Koditschek
PDF
Video
Technical Report
BibTeX
Reactive Mobile Manipulation with Legged Robots
Research Statement, summarizing the recent work in reactive planning and mobile manipulation with legged robots.
Vasileios Vasilopoulos
PDF
Video
BibTeX
Composition of Templates for Transitional Pedipulation Behaviors
We document the reliably repeatable dynamical mounting and dismounting of wheeled stools and carts, and of fixed ledges, by the Minitaur …
T. Turner Topping
,
Vasileios Vasilopoulos
,
Avik De
,
Daniel E. Koditschek
PDF
Video
BibTeX
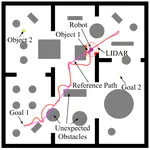
Reactive Navigation in Partially Known Non-Convex Environments
This paper presents a provably correct method for robot navigation in 2D environments cluttered with familiar but unexpected …
Vasileios Vasilopoulos
,
Daniel E. Koditschek
PDF
Video
Technical Report
BibTeX
Sensor-Based Reactive Execution of Symbolic Rearrangement Plans by a Legged Mobile Manipulator
We demonstrate the physical rearrangement of wheeled stools in a moderately cluttered indoor environment by a quadrupedal robot that …
Vasileios Vasilopoulos
,
T. Turner Topping
,
William Vega-Brown
,
Nicholas Roy
,
Daniel E. Koditschek
PDF
Video
BibTeX
Sensor-Based Reactive Symbolic Planning in Partially Known Environments
This paper considers the problem of completing assemblies of passive objects in nonconvex environments, cluttered with convex obstacles …
Vasileios Vasilopoulos
,
William Vega-Brown
,
Omur Arslan
,
Nicholas Roy
,
Daniel E. Koditschek
PDF
Video
Spotlight
Technical Report
BibTeX
»
Cite
×