A Hierarchical Deliberative-Reactive System Architecture for Task and Motion Planning in Partially Known Environments
Abstract
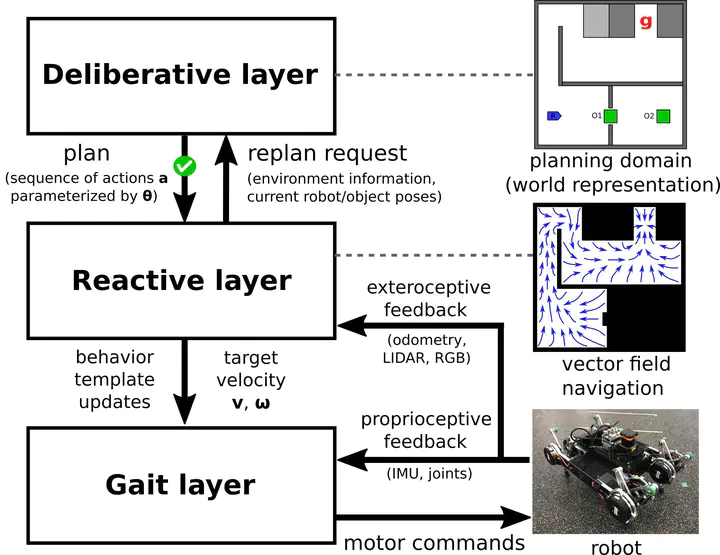
We describe a task and motion planning architecture for highly dynamic systems that combines a domain-independent sampling-based deliberative planning algorithm with a global reactive planner. We leverage the recent development of a reactive, vector field planner that provides guarantees of reachability to large regions of the environment even in the face of unknown or unforeseen obstacles. The reachability guarantees can be formalized using contracts that allow a deliberative planner to reason purely in terms of those contracts and synthesize a plan by choosing a sequence of reactive behaviors and their target configurations, without evaluating specific motion plans between targets. This reduces both the search depth at which plans will be found, and the number of samples required to ensure a plan exists, while crucially preserving correctness guarantees. The result is reduced computational cost of synthesizing plans, and increased robustness of generated plans to actuator noise, model misspecification, or unknown obstacles. Simulation studies show that our hierarchical planning and execution architecture can solve complex navigation and rearrangement tasks, even when faced with narrow passageways or incomplete world information.