Abstract
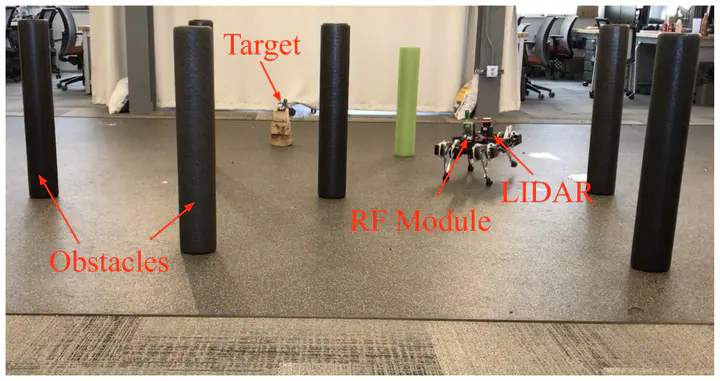
This paper demonstrates a fully sensor-based reactive homing behavior on a physical quadrupedal robot, using onboard sensors, in simple (convex obstacle-cluttered) unknown, GPS-denied environments. Its implementation is enabled by our empirical success in controlling the legged machine to approximate the (abstract) unicycle mechanics assumed by the navigation algorithm, and our proposed method of range-only target localization using particle filters.
Type
Publication
In Sensor-Based Legged Robot Homing Using Range-Only Target Localization